VOL 122
2022 JULYVOL 122
2022 JULY DAPA 연구록
DAPA 연구록 ④
DAPA 연구록
DAPA 연구록 ④
국방과학연구소는 탐사로봇을 이용해 지형정보를 파악, 3차원 지도를 만들 수 있는 자율터널탐사 기술을 개발했다. 실제 상황에서도 성능을 검증받은 로봇은 휴대 전화나 태블릿에서 원격 조종이 가능하다.
국방과학연구소는 2019년부터 개발해 온 방위사업청의 핵심기술사업을 통해 자율터널탐사(Autonomous Tunnel Exploration, ATE) 기술을 확보했다.
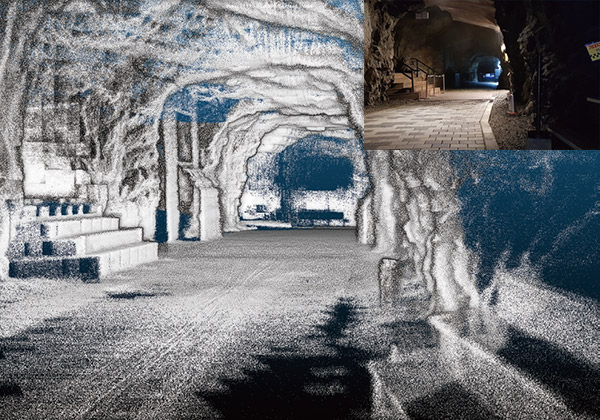
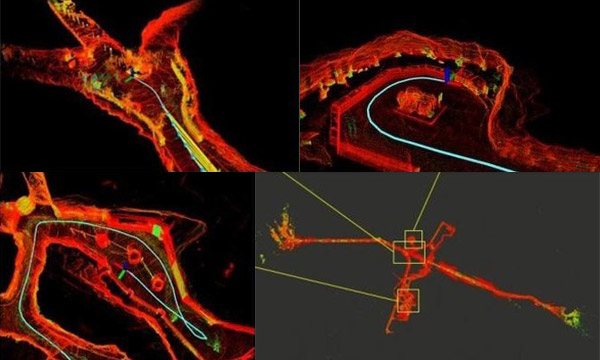
자율터널탐사 기술은 로봇을 이용해 지형정보가 없는 지역을 탐사하고, 위험을 탐지하며, 탐사 지역의 3차원 지도를 생성할 수 있다. 이번에 개발된 기술은 GPS 신호의 수신이 불가능한 동굴이나 지하시설 등에서도 사전 정보 없이 로봇의 자율 주행과 탐사를 가능하게 함으로써 기존 기술을 획기적으로 발전시킨 것으로 평가받고 있다.
국방과학연구소는 약 1.5km의 실제 동굴에서 수행한 시험에서 다양한 형태의 위험물체 인식과 오염지역 탐지, 수 cm급 해상도의 3차원 지도 생성 성능을 확인했다. 이번 연구는 국방과학연구소와 미국의 지상군 차량체계 연구소(Ground Vehicle System Center, GVSC)가 국제공동연구로 이뤄졌다. 한-미 양국은 미래 로봇기반의 연합작전 능력 배양을 위한 협력을 고려해 양국 로봇에 공통의 미들웨어(로봇 운영 처리 소프트웨어), 인터페이스, 데이터 형식을 적용했다. 양국 로봇 기술의 시너지를 위해 로봇 하드웨어 및 소프트웨어는 양국에서 독자적으로 개발했다.

국방과학연구소는 자체 연구개발을 통해 기능과 임무에 따라 형상을 바꿀 수 있는 모듈화된 로봇을 설계·제작하고, 독자 개발한 최신 AI 기술 기반의 인식, 판단, 탐사 소프트웨어를 로봇에 탑재했다.
또한 조작 및 운용 측면에서는 휴대폰이나 태블릿에서 원격 조종이 가능하게 해 한 명의 운용자가 여러 대의 로봇을 동시에 운용 가능하게 했다.
새로 개발된 기술을 적용한 로봇은 향후 국방분야에서 지하 시설작전, 도심전투 등에 투입돼 전투원의 안전을 확보하고 작전의 효율성을 획기적으로 높일 수 있다. 민간분야에서도 재난 현장이나 원전 시설처럼 사람의 접근이 어려운 장소에 투입돼 피해상황 파악 및 오염물질 탐지 등에 활용될 수 있다. 인공지능 기술이 집약된 자율터널탐사 기술은 무인로봇을 활용한 미래 전장상황에서 지상로봇과 드론을 융합한 다양한 임무의 무인화 시스템개발에 적용될 것이며, 기술의 완성도 향상을 통해 우리 국민과 군의 생명과 안전을 지키는 자율로봇체계로 발전해 갈 것이다.